
About Me
I am currently an Assistant Professor in the Department of Electromechanical Engineering at University of Macau. My research interests include:
- Learning-based control and optimal control
- Dexterous manipulation, robot control, and motion planning
- RL/ML in robotics, imitation learning, and transfer learning
- Embodied AI for robotic systems
- Safety analysis for AI-driven robotic system
I am focused on developing intelligent and robust AI-enabled autonomous and robotic systems with safety and reliability guarantees, ensuring their applicability to a wide range of complex real-world tasks and scenarios. Prior to joining the University of Macau, I was a Postdoctoral Research Fellow in the Department of Electrical and Computer Engineering at University of Alberta from 2022 to 2025, under the mentorship of Prof. Lei Ma and Prof. Zhan Shu. I received my Ph.D. from the Technical University of Munich in 2022, where I specialized in automatic control and robotics under the supervision of Prof. Martin Buss.
Available Positions:
Seeking exceptional Ph.D., Master’s, and Research Assistant (RA) candidates passionate about robotics research. We are looking for highly motivated students with strong academic backgrounds and a drive to tackle cutting-edge challenges in robotics. Competitive funding/support is available for outstanding applicants. Feel free to reach me at zhzhou@um.edu.mo!
News
- 01/2026: Our paper “Drivence: Realistic Driving Sequence Synthesis for Testing Multi-sensor Fusion Perception Systems” was published on IEEE Transactions on Software Engineering!
- 11/2025: Our paper “Mosaic: Model-based Safety Analysis Framework for AI-enabled Cyber-Physical Systems” was published on Empirical Software Engineering!
- 09/2025: Our paper “Online Safety Analysis for LLMs: a Benchmark, an Assessment, and a Path Forward” was published on IEEE Transactions on Artificial Intelligence!
- 08/2025: I joined the Department of Electromechanical Engineering at University of Macau as an Assistant Professor.
- 06/2025: Our paper “VLATest: Testing and Evaluating Vision-Language-Action Models for Robotic Manipulation” was presented at ACM FSE 2025!
- 01/2025: Our paper “Multilingual Blending: LLM Safety Alignment Evaluation with Language Mixture” was accpeted by NAACL 2025!
- 11/2024: Our paper “GenSafe: A Generalizable Safety Enhancer for Safe Reinforcement Learning Algorithms Based on Reduced Order Markov Decision Process Model” was published on IEEE Transactions on Neural Networks and Learning Systems!
- 06/2024: We gave a tutorial on “Quality Assurance for Autonomous Driving Systems: A Software Engineering Perspective” at Autoware Tutorial, IEEE IV 2024.
- 05/2024: Our paper “ISR-LLM: Iterative Self-Refined Large Language Model for Long-Horizon Sequential Task Planning” was presented at IEEE ICRA 2024!
- 03/2024: Our paper “Towards Building AI-CPS with Nvidia Isaac Sim: An Industrial Benchmark and Case Study for Robotics Manipulation” was presented at IEEE/ACM ICSE-SEIP 2024!
- 02/2024: Our paper “Enabling Versatility and Dexterity of the Dual-Arm Manipulators: A General Framework Toward Universal Cooperative Manipulation” was published on IEEE Transactions on Robotics!
- 10/2022: Our paper “Off-Policy Risk-Sensitive Reinforcement Learning-Based Constrained Robust Optimal Control” was published on IEEE Transactions on Systems, Man, and Cybernetics: Systems!
- 09/2022: I gave a talk on “Safe Reinforcement Learning with Model Order Reduction Techniques” at The 1st International Workshop on Safe Reinforcement Learning Theory and its Applications, IEEE MFI 2022.
- 07/2022: I joined the Department of Electrical and Computer Engineering at University of Alberta as a Postdoctoral Research Fellow.
- 07/2022: I received my Ph.D. degree from the Chair of Automatic Control Engineering (LSR) at the Technical University of Munich (TUM), supervised by Prof. Martin Buss.
- 09/2021: Our paper “Learning a Low-Dimensional Representation of a Safe Region for Safe Reinforcement Learning on Dynamical Systems” was published on IEEE Transactions on Neural Networks and Learning Systems!
- 06/2020: Our paper “A General Framework to Increase Safety of Learning Algorithms for Dynamical Systems Based on Region of Attraction Estimation” was published on IEEE Transactions on Robotics!
Featured Publications
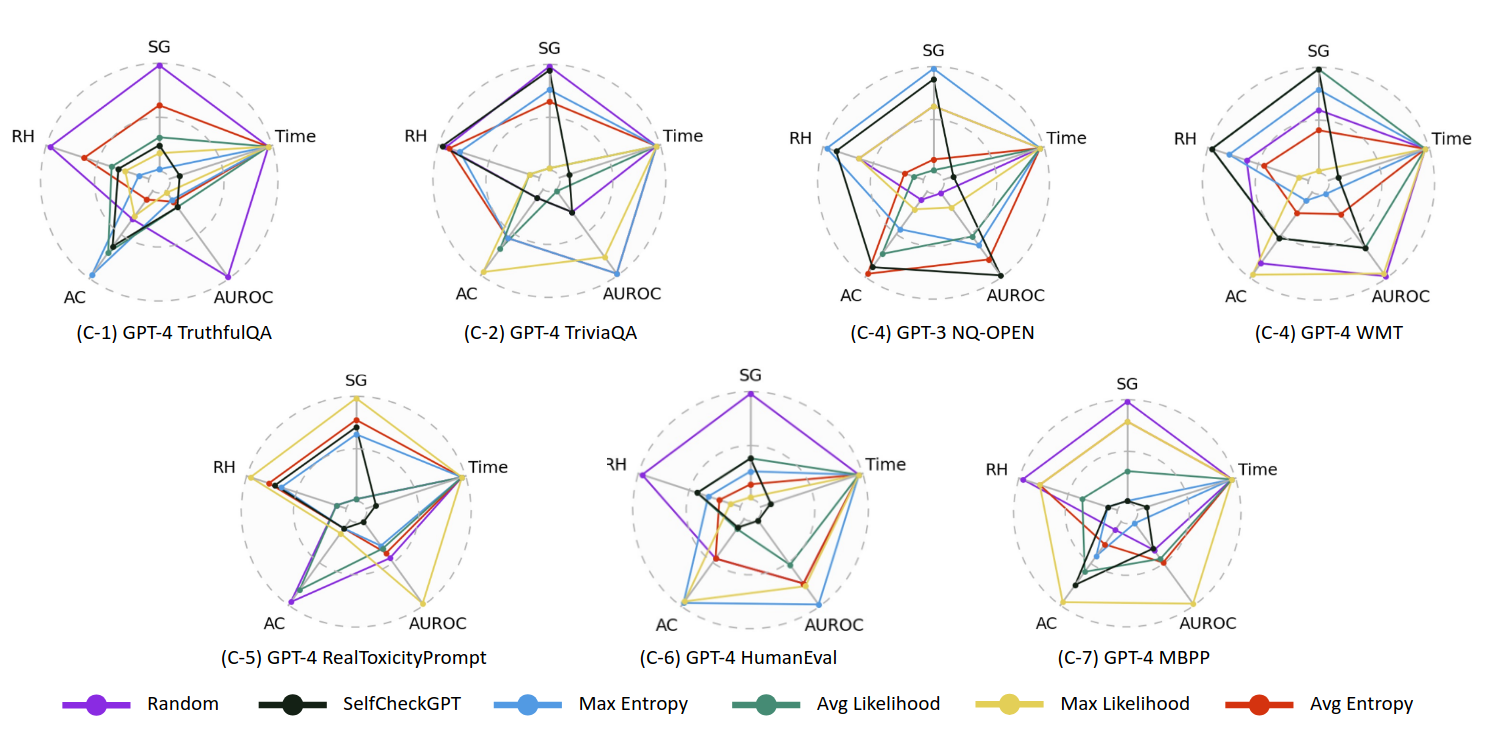
Online Safety Analysis for LLMs: a Benchmark, an Assessment, and a Path Forward
Xuan Xie, Jiayang Song, Zhehua Zhou, Yuheng Huang, Da Song, Lei Ma
IEEE Transactions on Artificial Intelligence, August, 2025
In this work, we conduct a comprehensive evaluation of the effectiveness of existing online safety analysis methods on LLMs.
PDF
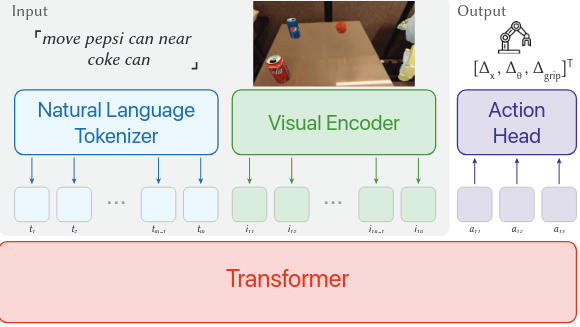
VLATest: Testing and Evaluating Vision-Language-Action Models for Robotic Manipulation
Zhijie Wang, Zhehua Zhou, Jiayang Song, Yuheng Huang, Zhan Shu, Lei Ma
2025 ACM International Conference on the Foundations of Software Engineering (FSE), June, 2025
We present VLATest, a fuzzing framework designed to generate robotic manipulation scenes for testing VLA models.
PDF
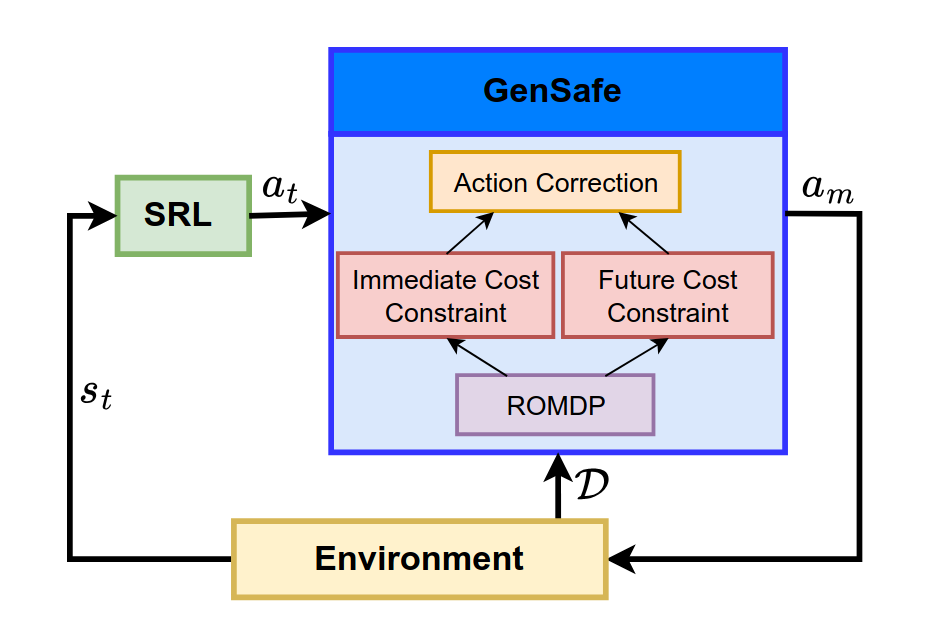
GenSafe: A Generalizable Safety Enhancer for Safe Reinforcement Learning Algorithms Based on Reduced Order Markov Decision Process Model
Zhehua Zhou, Xuan Xie, Jiayang Song, Zhan Shu, Lei Ma
IEEE Transactions on Neural Networks and Learning Systems, November, 2024
In this work, we introduce a Genralizable Safety enhancer (GenSafe) to improve the safety performance of safe reinforcement learning algorithms.
PDF
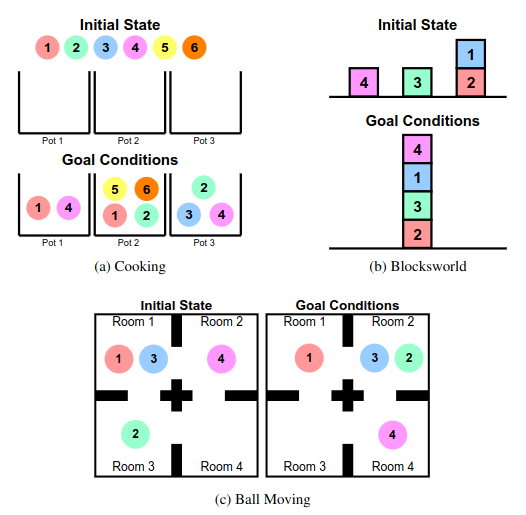
ISR-LLM: Iterative Self-Refined Large Language Model for Long-Horizon Sequential Task Planning
Zhehua Zhou, Jiayang Song, Kunpeng Yao, Zhan Shu, Lei Ma
2024 IEEE International Conference on Robotics and Automation (ICRA), May, 2024
In this work, we introduce ISR-LLM, a novel framework that improves LLM-based planning through an iterative self-refinement process.
PDF

Towards Building AI-CPS with NVIDIA Isaac Sim: An Industrial Benchmark and Case Study for Robotics Manipulation
Zhehua Zhou, Jiayang Song, Xuan Xie, Zhan Shu, Lei Ma, Dikai Liu, Jianxiong Yin, Simon See
IEEE/ACM 46th International Conference on Software Engineering: Software Engineering in Practice (ICSE-SEIP), April, 2024
As a foundational step towards building reliable AI-enabled robotics systems, in this paper, we propose a public benchmark for robotics manipulation.
PDF

Enabling Versatility and Dexterity of the Dual-Arm Manipulators: A General Framework Toward Universal Cooperative Manipulation
Yi Ren*, Zhehua Zhou* (equal contribution), Ziwei Xu, Yang Yang, Guangyao Zhai, Marion Leibold, Fenglei Ni, Zhengyou Zhang, Martin Buss, Yu Zheng
IEEE Transactions on Robotics, February, 2024
In this article, we propose a general and versatile control framework for dual-arm manipulators.
PDF
Learning a Low-Dimensional Representation of a Safe Region for Safe Reinforcement Learning on Dynamical Systems
Zhehua Zhou, Ozgur S Oguz, Marion Leibold, Martin Buss
IEEE Transactions on Neural Networks and Learning Systems, September, 2021
In this article, we propose a general data-driven model order reduction approach for safe reinforcement learning.
PDF
A General Framework to Increase Safety of Learning Algorithms for Dynamical Systems Based on Region of Attraction Estimation
Zhehua Zhou, Ozgur S Oguz, Marion Leibold, Martin Buss
IEEE Transactions on Robotics, June, 2020
In this article, we propose a computationally effective and general safe learning framework, specifically for complex dynamical systems.
PDF
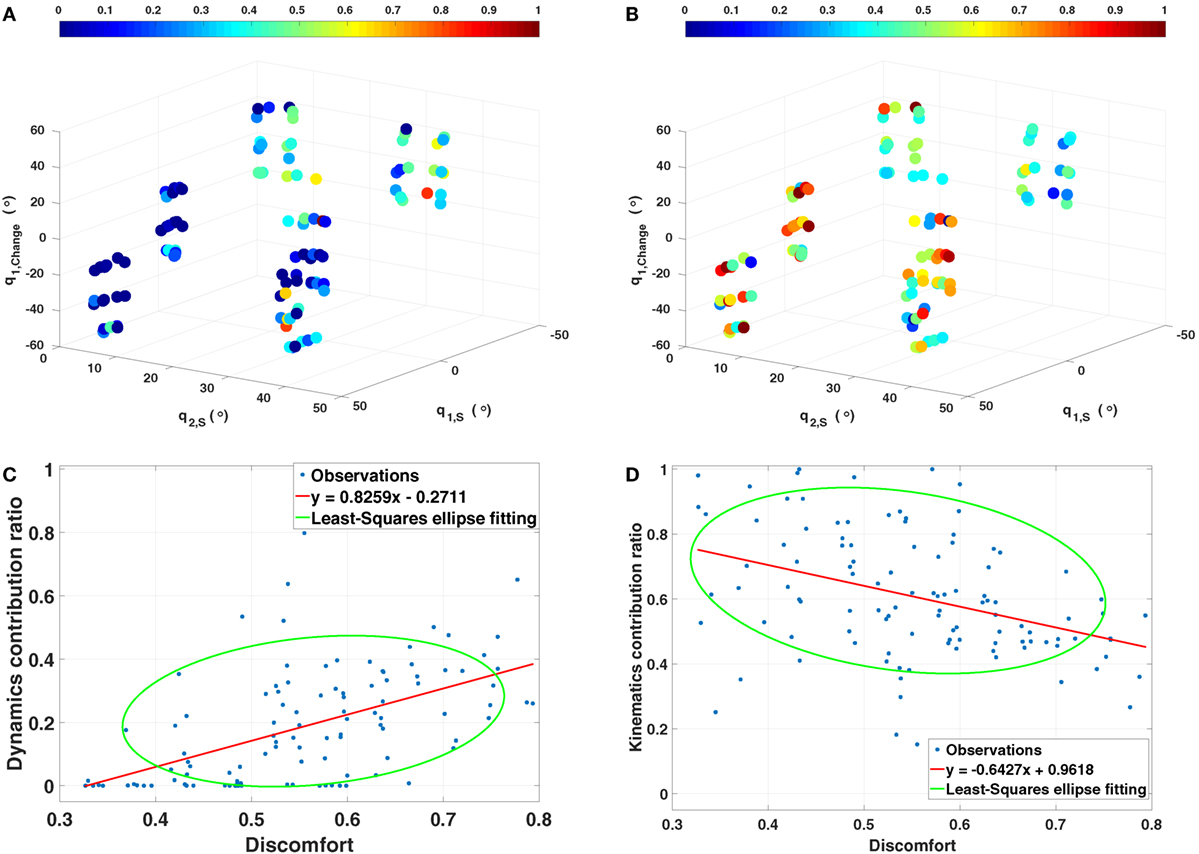
A Hybrid Framework for Understanding and Predicting Human Reaching Motions
Ozgur S Oguz, Zhehua Zhou, Dirk Wollherr
Frontiers in Robotics and AI, March, 2018
In this work, we propose a hybrid framework for understanding and predicting human reaching motions for human-robot collaboration.
PDF